如何理解機器人工作中的奇異點現(xiàn)象�����?

問題來了����,什么是奇異點呢?在其工作空間中存在一些特定點位��,這些點會導(dǎo)致機器人失去一個或多個自由度����,當機器人末端工具中心點達到或接近這些位置時,在其運動空間中會出現(xiàn)無窮解的情況��,即使機器人笛卡爾坐標值發(fā)生了很小的變化�����,也會導(dǎo)致軸關(guān)節(jié)發(fā)生很大的變化����,這樣就使得機器人無法正確的按照軌跡規(guī)劃運動。因此��,在工業(yè)機器人領(lǐng)域?qū)⑦@些點稱為機器人奇異點。
機器人在奇異點附近進行規(guī)劃運動(直線��、圓弧等�,不包括關(guān)節(jié)運動)時會報警停止,機器人運動編程時應(yīng)盡量避開奇異點或以關(guān)節(jié)運動通過奇異點���。是不是很難理解?別急往下看����。
首先,我們要知道機器人的運動
包括插補運動和關(guān)節(jié)運動�����。
而機器人的運動學(xué)算法包括正向運動學(xué)和逆向運動學(xué)�����。關(guān)節(jié)運動屬于正向運動學(xué)���,這一點非常好理解�����,當你告訴機器人某個關(guān)節(jié)需要運動多少度��,那機器人會非常聽話的運動到對應(yīng)的角度�。
插補運動是機器人逆向運動學(xué)算法,也就是機器人根據(jù)要求的笛卡爾坐標值���,逆向計算出各個關(guān)節(jié)需要運動的角度�。
因此�����,要熟練的應(yīng)用工業(yè)機器人���,對工業(yè)機器人奇異點進行一定程度地了解是非常有必要的�����。常見的六軸串聯(lián)工業(yè)機器人會在三個位置逆解出無數(shù)個解的情況���,出現(xiàn)三種奇異點,分別為肩關(guān)節(jié)奇點��、肘關(guān)節(jié)奇點和腕關(guān)節(jié)奇點�����。
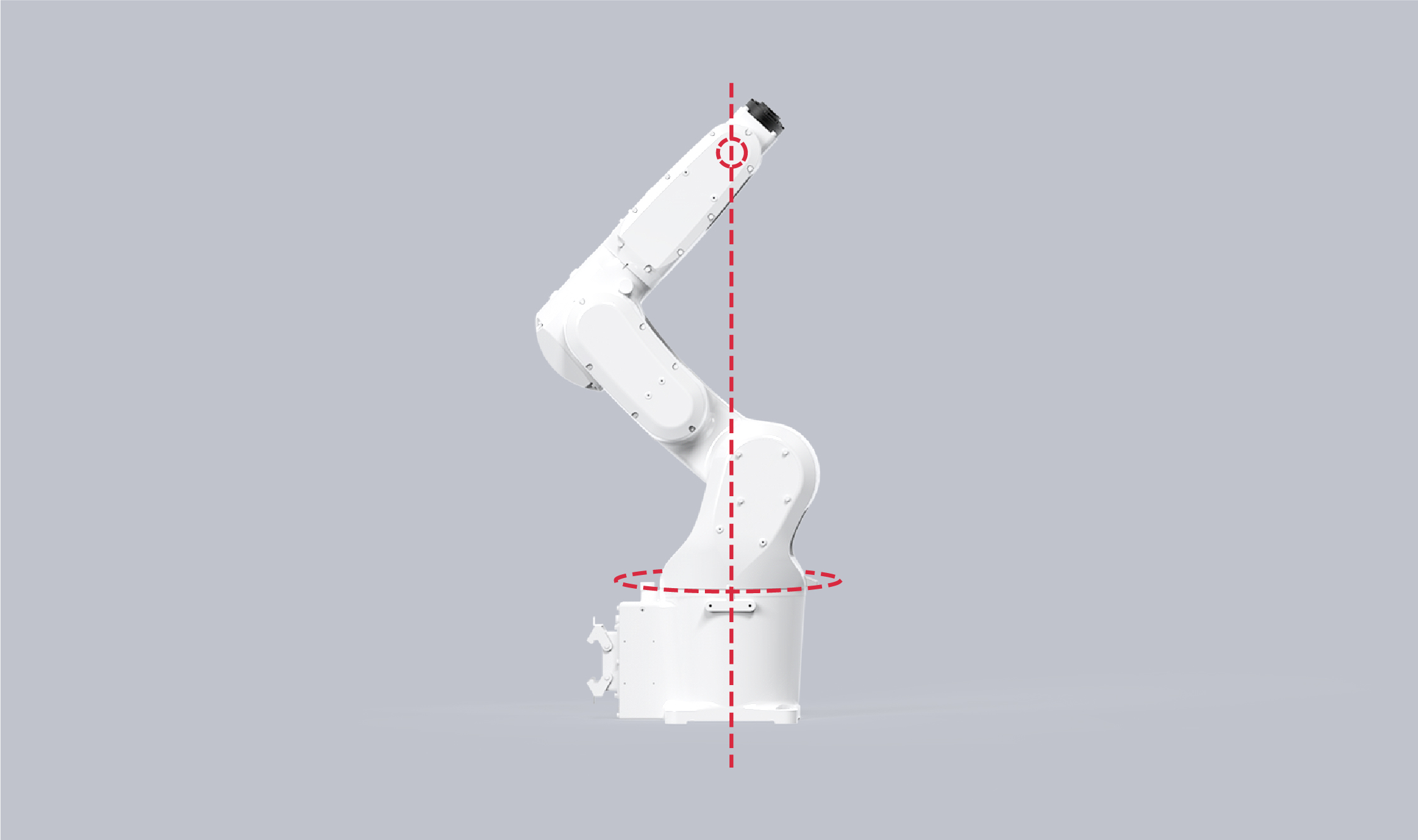
肩關(guān)節(jié)奇異點是指在機器人運動空間內(nèi),腕關(guān)節(jié)中心點與第一個關(guān)節(jié)的軸線共線��。如下圖所示���。
這種情況下��,會導(dǎo)致關(guān)節(jié)軸1和關(guān)節(jié)軸4試圖瞬間旋轉(zhuǎn)180度。從而引起機器人超速報警���,出現(xiàn)無法繼續(xù)工作的狀況����。
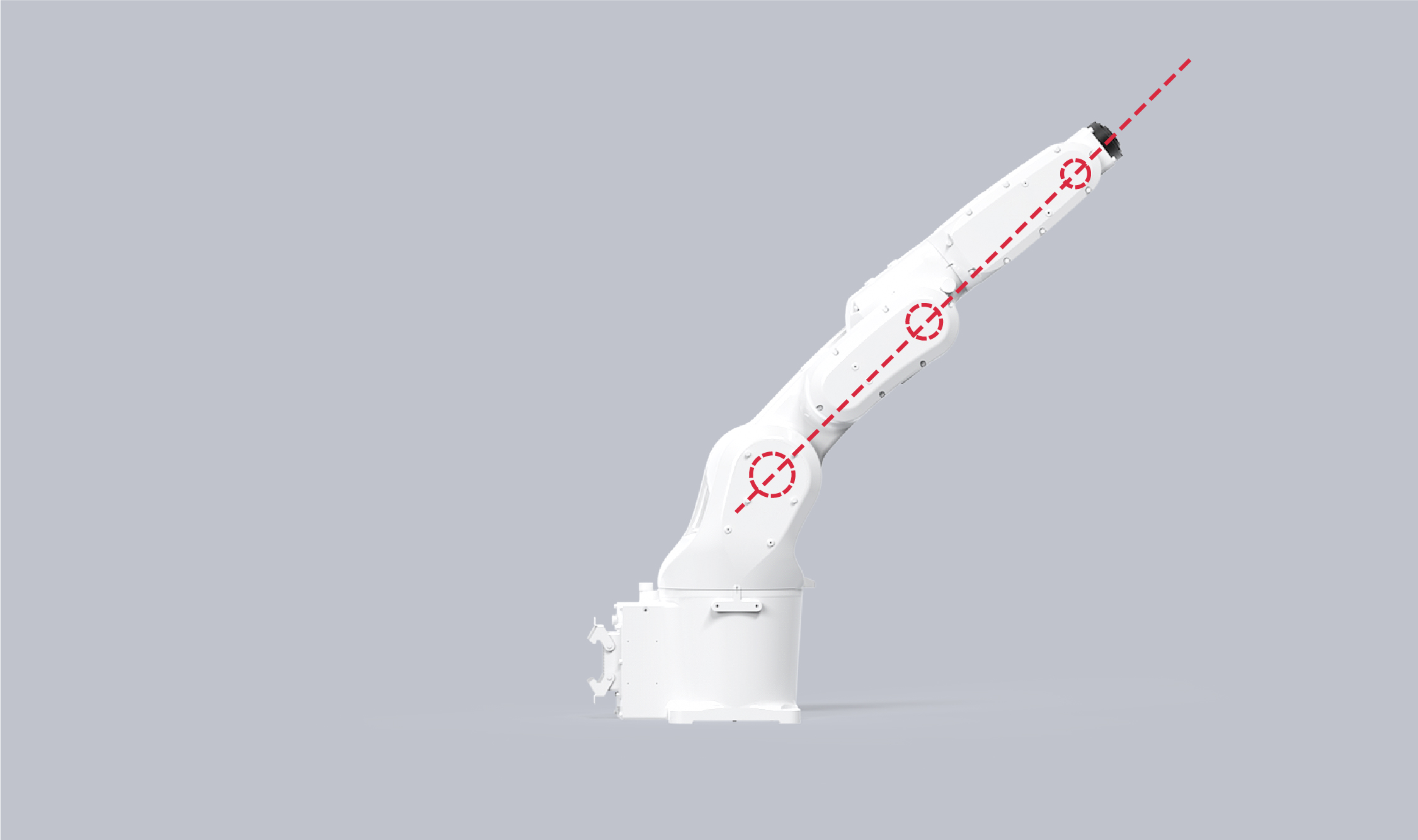
肘關(guān)節(jié)奇異點是指在機器人運動空間內(nèi)����,腕關(guān)節(jié)的中心點落在關(guān)節(jié)2和3的軸線形成的平面上。如下圖所示���。
肘關(guān)節(jié)奇異點一般位于機器人工作區(qū)域的最外緣�����,看起來像機器人“伸得太遠”�,導(dǎo)致肘部鎖定在某個空間位置無法運動。
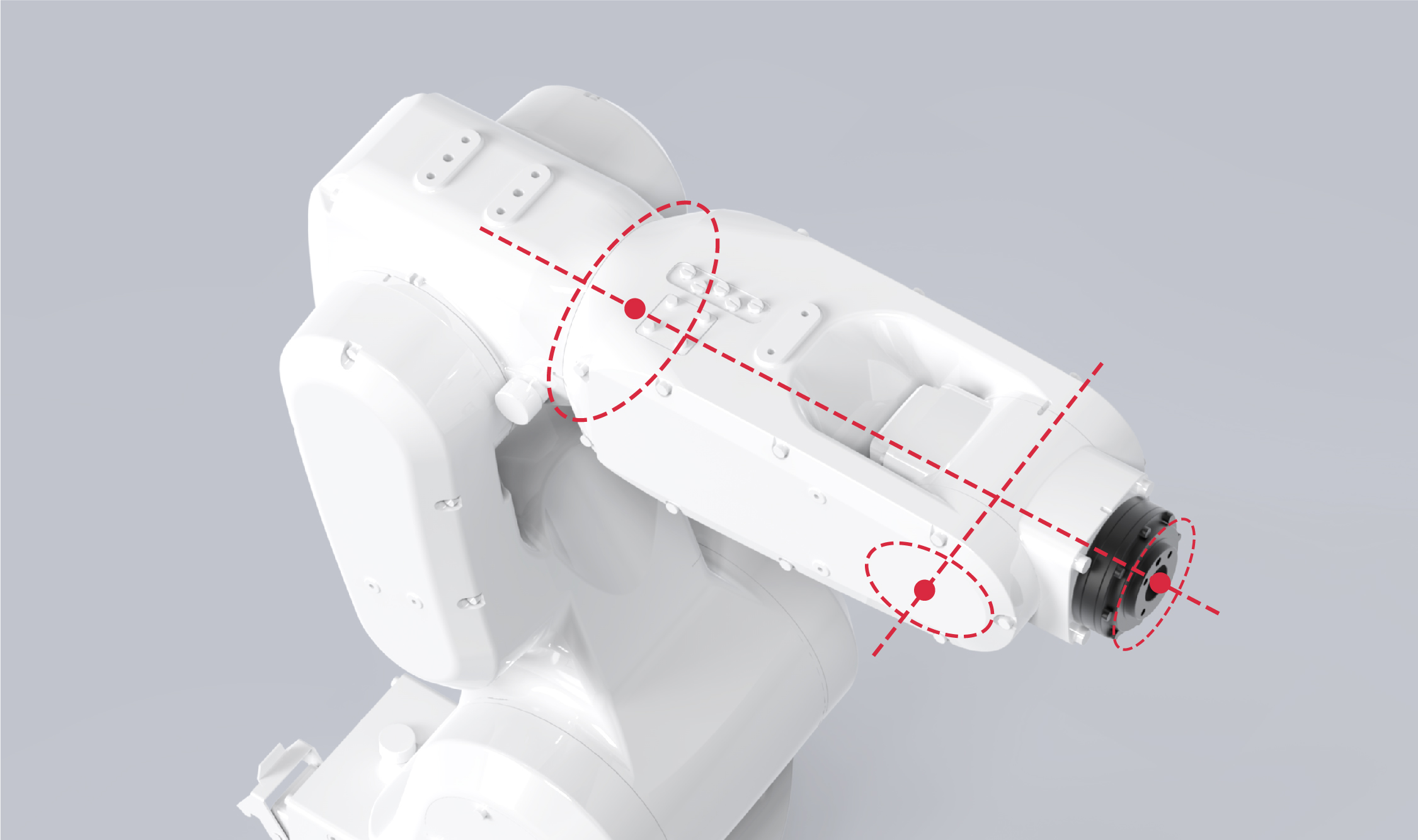
腕關(guān)節(jié)奇異點是指在機器人運動空間內(nèi)�����,關(guān)節(jié)4和關(guān)節(jié)6的軸線與關(guān)節(jié)5的軸線在同一平面內(nèi)���。如下圖所示���。
以上情況會導(dǎo)致機器人逆向運動學(xué)算法逆解的結(jié)果相互補償,形成無數(shù)個解�。我們可以從圖中看到,肩關(guān)節(jié)奇異和肘關(guān)節(jié)奇異位置都在機器人非主要工作區(qū)域�,一般不會在調(diào)試中出現(xiàn)這樣的姿態(tài),處理較為簡單�,只要限制機器人作業(yè)范圍,就可輕易地回避��。
但是腕部奇異點不同�����,在機器人工作區(qū)域的幾乎所有位置都有可能發(fā)生���,其規(guī)避方法相對困難��,在實際應(yīng)用時��,可以利用使末端工具增加一定角度的辦法���,避免腕部4軸和6軸中心共線���。
因此,了解腕部奇異點的發(fā)生機理����,并根據(jù)具體情況靈活應(yīng)對�����,是確保機械臂穩(wěn)定運行的關(guān)鍵���。在路徑規(guī)劃中���,要盡量避免機械臂經(jīng)過奇異點。例如���,在焊接任務(wù)中���,如果焊接點恰好在機械臂運動的路徑點上����,我們可以通過識別末端路徑上的奇異點區(qū)域���,將焊接板放置在沒有奇異點的路徑上�����,就可以最大程度地避免機械臂經(jīng)過奇異區(qū)域��,充分發(fā)揮機器人作業(yè)的優(yōu)勢��。

 地址:中國(安徽)自由貿(mào)易試驗區(qū)蕪湖片區(qū)萬春東路96號
地址:中國(安徽)自由貿(mào)易試驗區(qū)蕪湖片區(qū)萬春東路96號 電話:400-052-8877
電話:400-052-8877 傳真:0553-5635270
傳真:0553-5635270


